

XPLORE THE MISSION. NOT THE LIMITS.
Leandra XPLORE Use Cases
Overview of our application areas
Leandra XPLORE Features
Overview of our core capabilities

Leandra XPLORE can be operated from a safe distance with low latency and high precision. This ensures reliable handling even in safety-critical or inaccessible environments.

Leandra XPLORE autonomously detects a designated operator or lead vehicle and follows independently. The function operates reliably even in rough terrain and without manual intervention.

Leandra XPLORE independently executes predefined missions, including navigation, obstacle avoidance, and target approach. Typical applications include exploration, inspection, perimeter security, and payload transport.
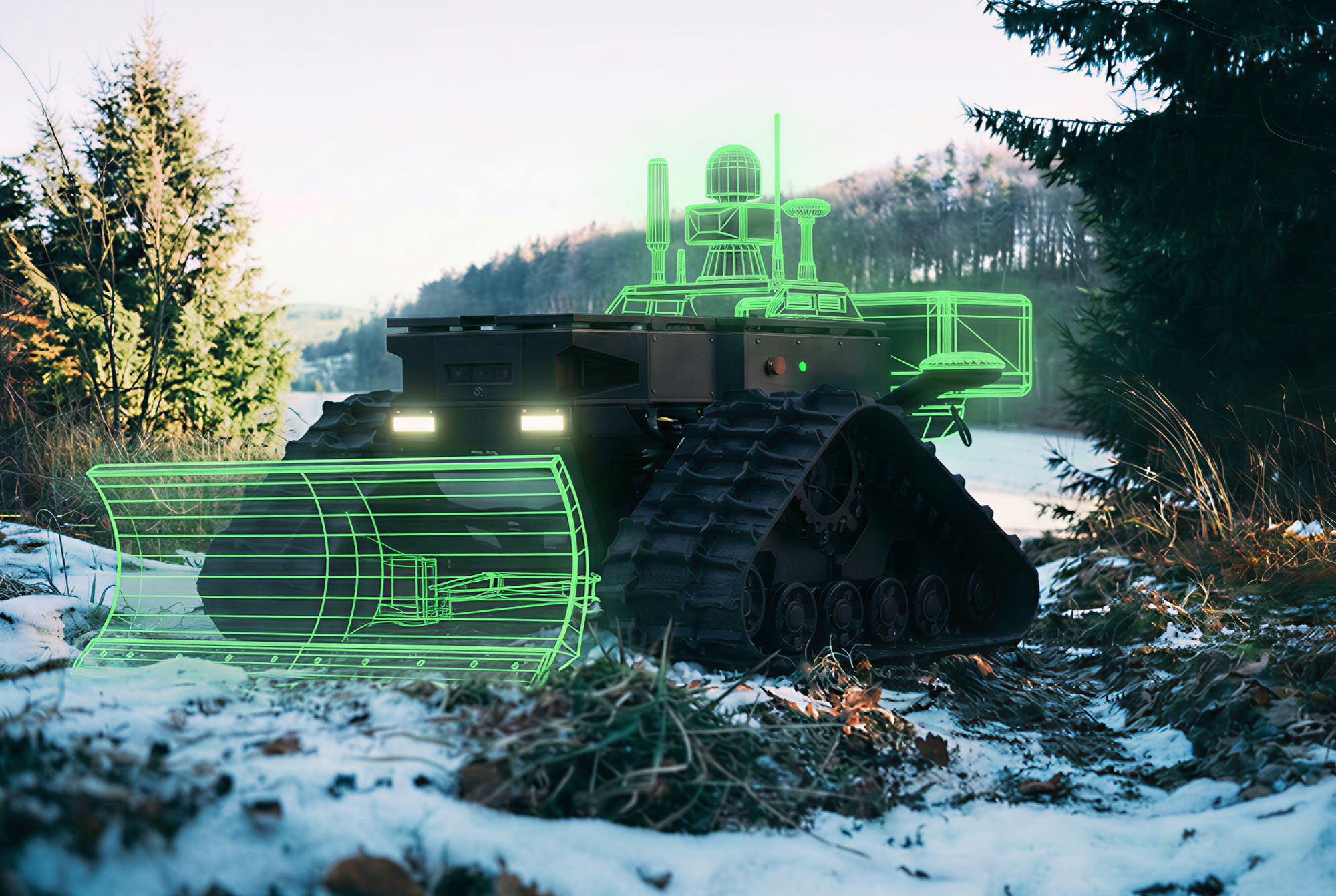
Modular interfaces enable seamless integration of sensors, robotic arms, communication units, or specialized payloads. Leandra XPLORE can therefore be flexibly adapted to mission-specific requirements.
Leandra XPLORE in Action
Technology in real-world operation – captured from above and explained first-hand.
Software Stack
Modular by design. Compact by execution. Leandra XPLORE leverages a software-defined architecture to enable flexible, mission-specific configurations and reliable operation in real-world environments.

The system is designed to be hardware-agnostic and can be deployed across different robotic platforms and vehicle types. This ensures that Leandra XPLORE remains scalable and future-proof across a wide range of operational scenarios.
Leandra XPLORE
Leandra OS
Modular base software with user interfaces, core middleware, and system supervision.
Enabling reliable operation through state machines, lifecycle management, and platform abstraction.
Leandra Core
Drive-by-wire control system for vehicles and robotic platforms.
Providing a safe, deterministic interface between software functions and vehicle actuators.