


Discover real space projects our team has successfully delivered.
iframe content
IN A NUTSHELL
„We provide solutions for scalable satellite and space systems, enabling flexible mission execution and intelligent autonomous operation at industrial scale.”
What we do
Addressing the growing demand for industrialised space systems and increased on-board autonomy in modern satellite missions.
Space by efs combines robotics, control engineering and AI with automotive-grade software processes. We enable software-defined spacecraft with intelligent, autonomous decision-making for small satellite missions, orbital robotics and future in‑space services.
Our mission
To enable software-defined spacecraft with autonomous decision-making — pushing the boundaries of small satellite missions, orbital robotics, and future in-space services.
Our offering
We develop intelligent software architectures and advanced algorithms — enabling operation even in uncertain, dynamic space environments and on cost-effective hardware. Enabling autonomy in space through industrial-grade software development.
01 Integrated Space Software Toolchain
We provide a coherent toolchain for the complete space software lifecycle — fully aligned with the V‑model.
- Requirements management and MBSE
- System and software modelling
- Model-based design and code generation
- Manual implementation and refactoring where needed
- Continuous integration with automated builds and tests
- SIL, HIL and mission-like validation environments
- Automated documentation and traceability from requirements to code and tests
02 Software Architecture & Flight Software Engineering
We develop ECSS-compatible software architectures and flight software that are tightly integrated with our toolchain.
Modular, scalable onboard architectures
- Clear interfaces and abstraction layers for payloads and GNC/ADCS
- Support space standards CCSDS and ECSS
- Implementation in C/C++ and embedded platforms
- Automated unit, integration and regression testing
03 Robotics
We develop autonomous robotic capabilities for orbital and planetary environments, using the same underlying toolchain and verification framework.
- Motion planning and trajectory optimisation
- Learning-based planning and navigation
- Wheel- and actuator-level collision avoidance
- Multi-layer control architectures for rovers and servicers
- Verification and validation in simulation and on hardware prototypes
04 ADCS/AOCS
We design advanced attitude and orbit control solutions, from classical robust control to learning-based methods.
- Model Predictive Control (MPC) for small satellites
- Robust and data-driven control for complex manoeuvres
- Guidance, navigation and control for proximity operations, rendezvous and formation flying
05 Interface to Automotive & Cross‑Domain Systems
We connect the space domain with automotive, defence and mobile robotics, enabling technology spin-ins and spin-outs across industries. – Functional safety and security principles
- Spin-ins for companies entering the space domain from automotive, defence or robotics
- Spin-outs of space technologies such as communication, autonomy and sensing into mobility and defence platforms
- Cross-domain integration of communication, navigation and autonomy stacks
- Harmonised development processes for multi-industry collaborations
06 Control Engineering & Automation
We leverage strong control engineering foundations complemented by modern AI techniques.
- Model-based and data-driven control design
- Robustness and stability analysis under uncertainty
- Multi-actuator and multi-sensor integration
- Adaptive and learning-based control strategies for challenging environments
07 MBSE
We use model-based systems engineering to structure complex missions and design robust fault management.
- Digital system and software models
- End‑to‑end traceability from requirements to tests
- Verification packages aligned with ECSS expectations
-
ESA SysML Solution support including SysMLv2
Our stunning use cases
Next-Generation Autonomous Space Systems
From Algorithms to Orbit: Smart Spacecraft Coordination/Control
This video shows representative application scenarios for our control methods and software approaches in satellite missions. It includes precise pointing, communication link pointing, formation flying, relative navigation, and constraint-aware guidance. The scenarios are intended to illustrate how advanced control methods, safety-oriented learning-based approaches, and professional software development can be combined under realistic space hardware constraints.

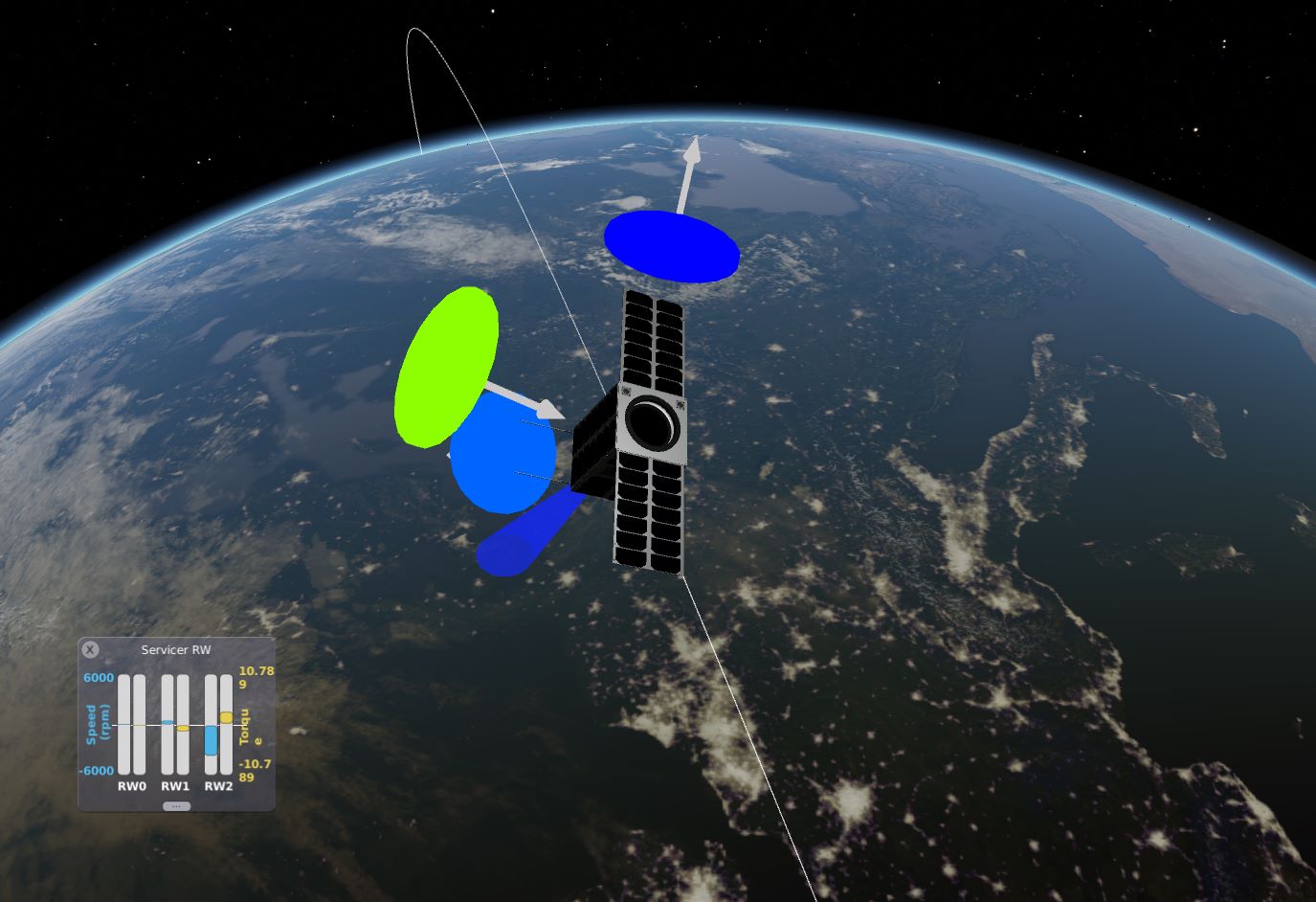
KISMOS - AI Safety for In-Orbit-Servicing
Robust and learning-based orbit and attitude control for In-Orbit Servicing
In KISMOS, we develop advanced and learning-based control approaches for in‑orbit servicing missions. The focus lies on safe rendezvous and proximity operations, where a servicer satellite has to approach and interact with a client spacecraft. Our algorithms are designed to remain robust under uncertainties and constraints, and are validated using realistic use cases and hardware platforms.
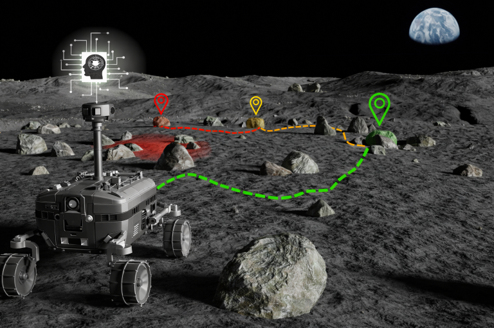
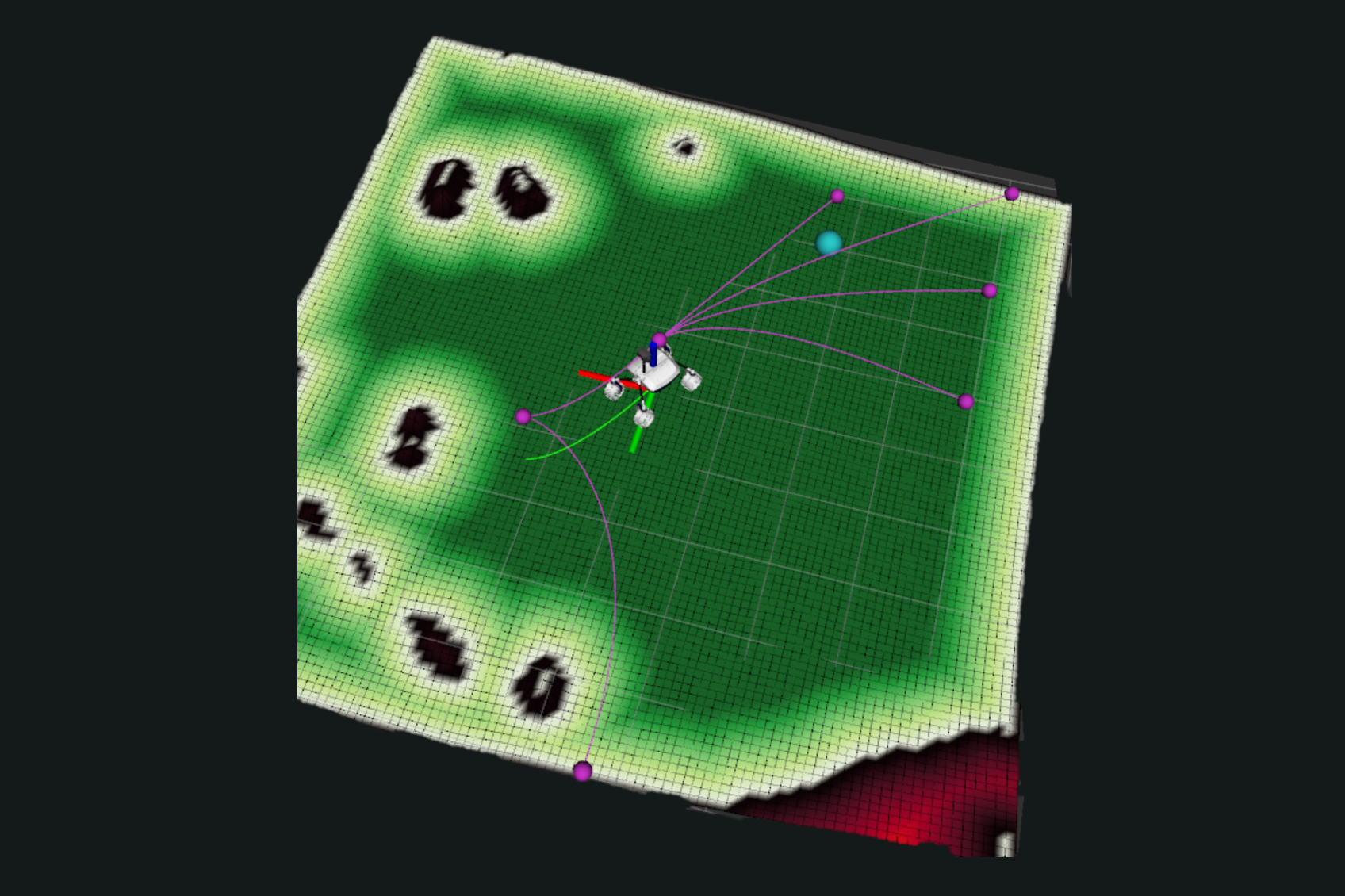
Planet-KI - Rover Navigation
Motion planning and AI-based navigation for planetary rovers
Planet‑KI explores learning-enabled motion planning and navigation for planetary rovers in unknown terrain. We implement planning algorithms with wheel-level collision avoidance and integrate them into multi-layered control architectures within our toolchain. Software verification and validation are carried out in high‑fidelity simulations and on rover prototypes.
DeLeMIS - Rover Control
DeLeMIS – AI‑Based Rover Control in Uncertain Terrain
DeLeMIS advances whole-body control strategies for rovers operating in dynamic, degraded or otherwise uncertain environments. We design AI-enhanced control approaches that adapt to disturbances and uncertain terrain properties. The control software is developed and tested through our integrated toolchain and demonstrated on hardware up to TRL 5
CubeSat - Attitude Control
Advanced on-board control for small satellites
In this work, we investigate the feasibility of model predictive control (MPC) for CubeSat attitude control. Our team evaluates control performance under realistic hardware constraints, including limited computational resources and actuation. The results prepare the ground for future in-orbit demonstrations of MPC-based ADCS on small satellites.

We turn research-driven prototypes into scalable, robust flight software
Our mission is to take visionary research concepts, the ideas and system prototypes of our customers and turn them into high-performance, scalable and robust systems. We achieve this by combining model-based engineering, advanced control and autonomy with industrial-grade software practices. Drawing on expertise in space robotics, ADCS/AOCS and automotive-quality development, we create systems that perform dependably in dynamic, uncertain environments - in orbit and within terrestrial mobile robotics. This is how ideas evolve into technology that is ready to fly, ready to operate and ready to scale.
Niklas Baldauf, Space Expert

Contact Form
Let us know your use cases and how we can support you. We’ll get back to you promptly.